
Accomplishments
The final report… at this point, we’re laser focused on integrated everything. Besides the robot and finalizing the demonstration setup (the wood base-board warped due to being so thin… tape everywhere!), I whipped up a metrics visualization script that plots shots made onto a graph. It differentiates between shots outside of the robot’s catching area, shots made inside the square area, and shots made in the cup without needing assistance (a splash!). This was accomplished through matplotlib. I need to add a bit more to show accuracy, shots made percentage over a total session, and I think it would be cool to include a color map based on how far the shot is away from (0,0). But it’s mostly complete.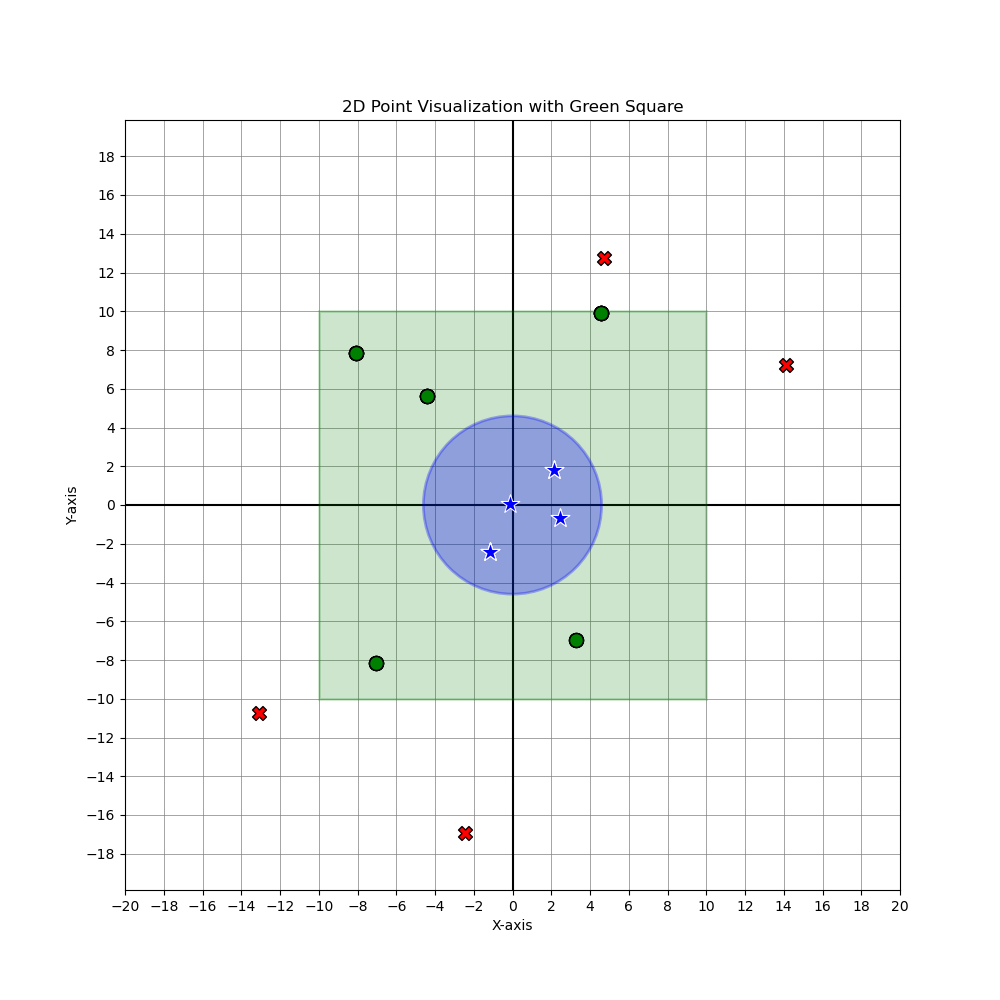
Progress
I’ve additionally been helping Jimmy with integrating the robot with the camera + Kalman operation. Next is shifting gears to churning out the poster and video.