The most important risk we have now is the stability of the physical system. Now that our team have completed most of hardware and software components of the project, we are now left with the mechanical part, of which all of us are inexperienced. We are planning to integrate all parts together using wood pieces. To mitigate risk, we plan to ask for help from staff at Techspark for cutting the wood, as well as reaching out to MechE friends for advices.
We are considering making changes to our design or latency requirements. Before, we were hoping that a new motor would boost the speed of erasers by 4 times, but the motor we receive does not meet the specifications of its data sheet, therefore it cannot be used. We are reaching out to the vendor about this issue. If things does not work out, we are considering relaxing latency requirements of the system and using the slower model we had.
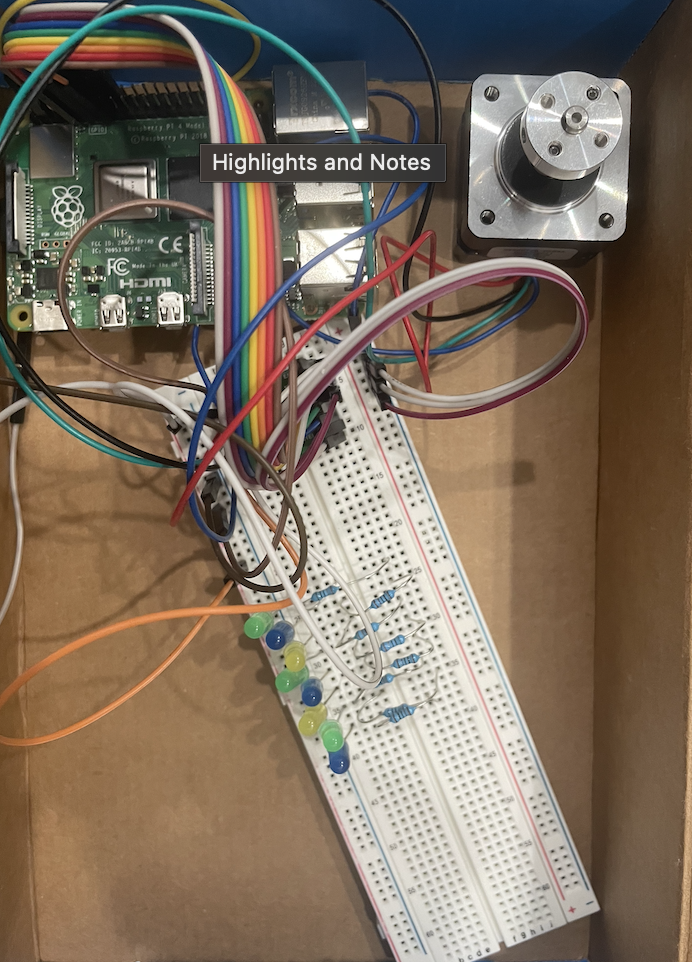
Here is a photo of the mechanical system we have built so far. 
In response to weekly question, our team has collaborated effectively throughout the semester. We know each other before this class, and decided to take 18500 together as a team. Thus, since we know each other well, we are able to communicate effectively. The main strategy for our collaborations is to discuss problems and assign tasks clearly during our meetings, then work on our assigned tasks individually. We make it clear what each person is responsible for and when each person is available, so that everybody has a clear picture of what’s going on. Overall we are all proud of what we’ve accomplished as a team.