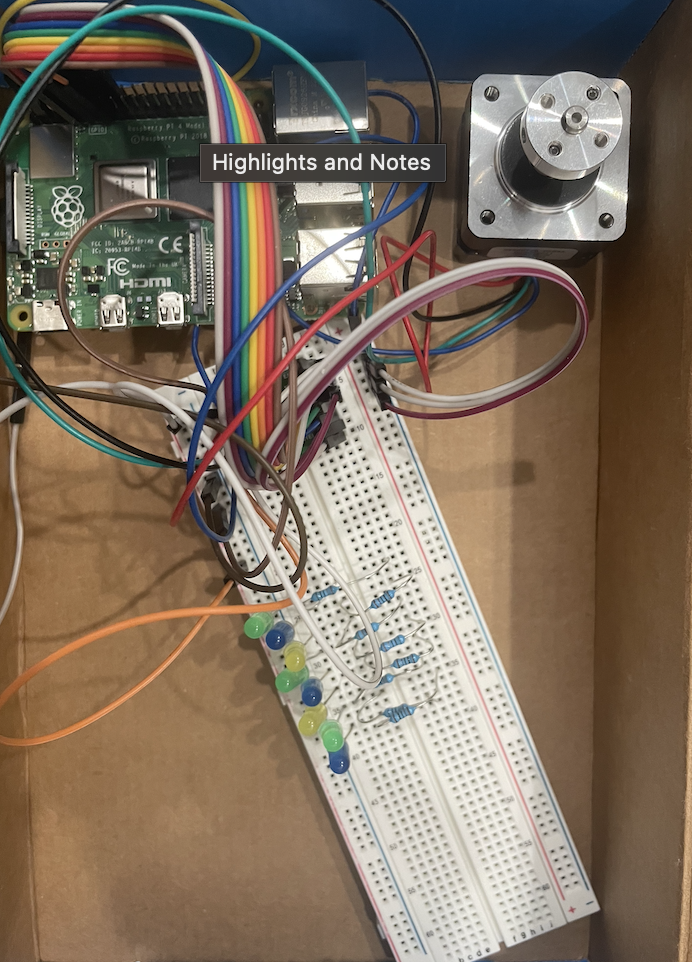
After finalizing our attachment design and completing the ethics assignment a week ago, our team spent the majority of time building our system in the past week. As Xiaoyu worked on the RPi code used in motor control, I and Jiayi continued working on the integration of the backend and frontend of our web application. Individually, I wrote the models.py, forms.py, and urls.py to help with the integration. In addition, I have spent a lot of time investigating the camera module, connecting it to the internet, and writing the code to control it and take a picture. Currently, I managed to complete the code that asks the camera to take a snapshot and store it in the local directory.

However, the current setting of the camera requires my computer to run the code to be connected to the camera’s WIFI hotspot or with a router through an ethernet port. I will still need to figure out how to connect the camera to a wireless network since this is required if we want to deploy our website and use the web application backend to communicate with RPi. Since the manual of the IP camera is a bit confusing in the wireless connection part, I have written an email to the technical support of the supplier of the camera and will continue investigating the solution to this problem.
Our original plan is to complete camera control functionality in the next week, but for the purpose of the interim demo, we have decided to complete it in advance so we can have more to demonstrate. Therefore, our progress is currently on schedule.
For next week, I hope to finish our web application, further polish its interface, and complete the usability testing of the website. Moreover, once receive the reply from the supplier, I will work on connecting the IP camera with the wireless network of CMU and finish the unit testing of the camera.