
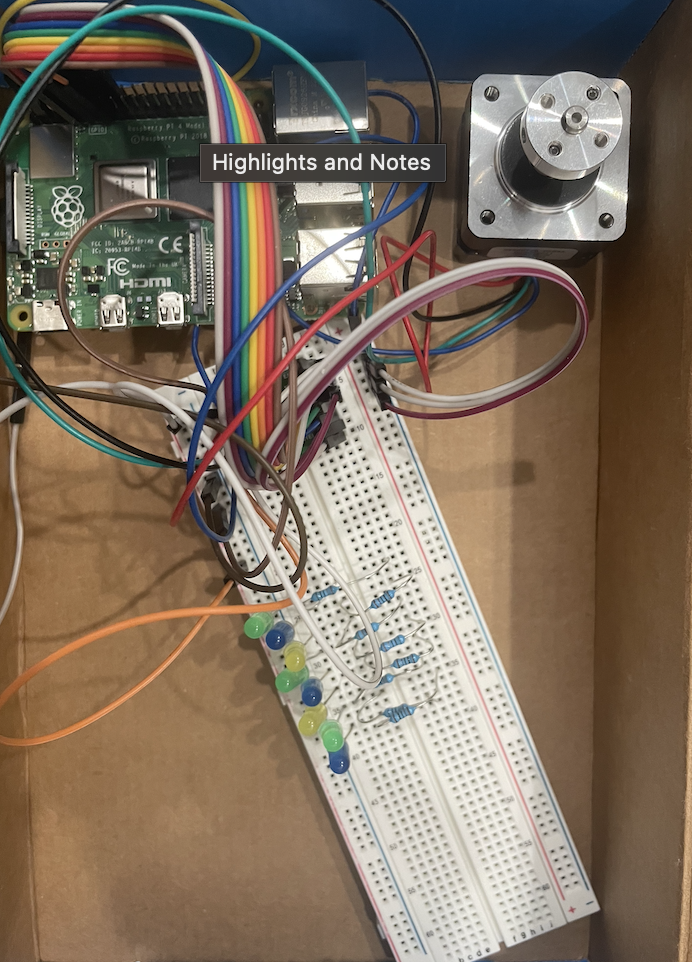
This week I was working on controlling the stepper motor with Raspberry Pi. I spent quite some time learning to boot the RPi for the first time. I had some trouble with the micro SD card but managed to resolve that. After successfully boot the Rpi and access it through SSH, I also started testing my code written last week with some simple circuitry. I don’t have the power supply needed for the motor to spin, but I visualized the input and outputs to the motor driver with LEDs and they look fine now. Attached are pictures of the RPi.
Although last week my schedule was behind, this week I am gradually catching up. I still need to put in some effort in the next few days to make the motor spin, by connecting it to a power supply and (maybe) further debugging. Also, our non-captive stepper motor should be on the way, so our team can start assembling things on the whiteboard next week.