
What we worked on as a group
- Code implementation for parking algorithm
- Preliminary testing for state detection accuracy
- Preliminary draft for instruction generation
- Verbal instruction
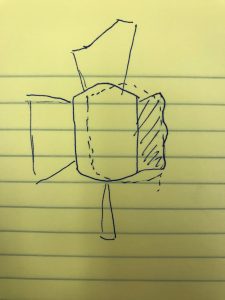
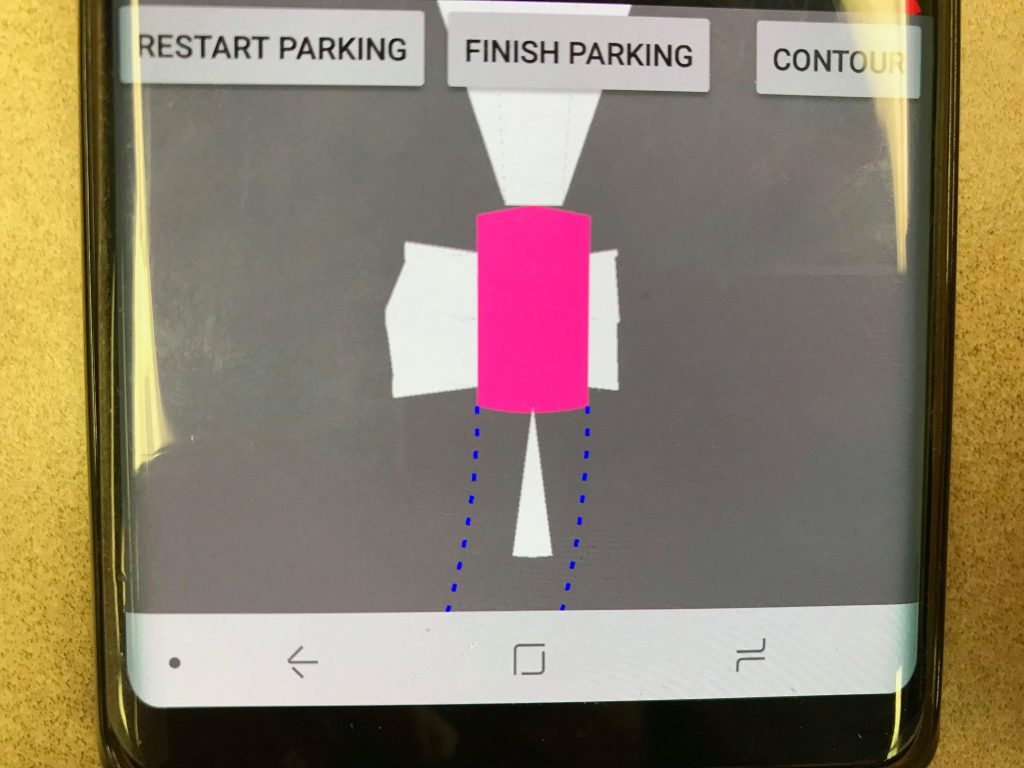
- Plot of desired position on our obstacle outline
Hubert
- Cont’d work on headless start
- emulator doesn’t have cellular and cannot create mobile hot spot
- Plotting the desired position for the initial parallel position
- Adding code infrastructures for debugging and plotting destination car positions.

Zilei
- Set up code structure for parking algorithm
- State detection & handling different cases
- Required environment: existence of a reference vehicle,
- display debug statements to textfield
- Idle state
- idle, waiting for button to start
- could potentially add beeping when vehicle gets too close to surrounding
- Search state
- the most complicated of all
- Will rely on readings from
- a designated parking sensor on the rear right end of the vehicle to determine whether the car is parallel with the reference car in wrt the y-axis
- all right sensors & parking sensor for when the distance is too close, in range, too far, or the reference car completely out of sight
- angle with respect to the reference car
- Reverse right state
- Reverse left state
Yuqing
- Restart & end algorithm buttons
- change text
- communicate with the algorithm class
- Researched on packages available for playing verbal instruction
- Integrated one sample sound into the App