
What we did as a team:
- Integrated all parts of the system and demoed the first version of the app (without parking instruction) on an Android device
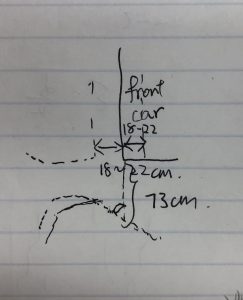
- Experimentally determined the exact points of references when generating parallel parking instruction
- We assigned parking lot on an empty space
- Yuqing drove the testing vehicle while Zilei and Hubert experimented with giving different instructions at different reference points
- Iterated the process with different reference points and different instructions and decided on the first version of our reference points
- Testing setup

- What we found out:
- The parking spot needs to be at least of dimension 3m x 1.2m
- The exact point at which the driver needs to turn the steering wheel all the way to the right
- The exact point at which the driver needs to turn the steering wheel all the way to the left
- The systematic approach specified above ensures mostly successful parallel parking into the allocated parking spot
Hubert
- Updated ultrasonic sensors driver to minimize the delay of outline plotting
- Refined Gyroscope driver to ensure handling of errors occurred during accidental disconnection
Zilei
- Drafted a flow chart for Parking Instruction Generation algorithm


- Helped experimentally determined reference points for the testing vehicle in real life
- Removal of the “straight reverse” stage
- Determined the approximate size of the spot we need
- When to steer left from full right
Yuqing
- Refined path plotting algorithm to reflect more realistic projection of car path by measuring the curvature offset of the car path in the video image
- Fixed multiple bugs in the current plotting algorithm