
What we did as a group
- Reconnected jumper wires
- Changed our current network protocol, so that no socket is reused and RPI can handle the video streaming between socket read/writes. This solved our previous problem not being able to stream & draw
- Changed ultrasonic sensor pulling rate so that (1) no outdated data is being used to draw contour, (2) delay for each reading is less. We improved our reading delay significantly.
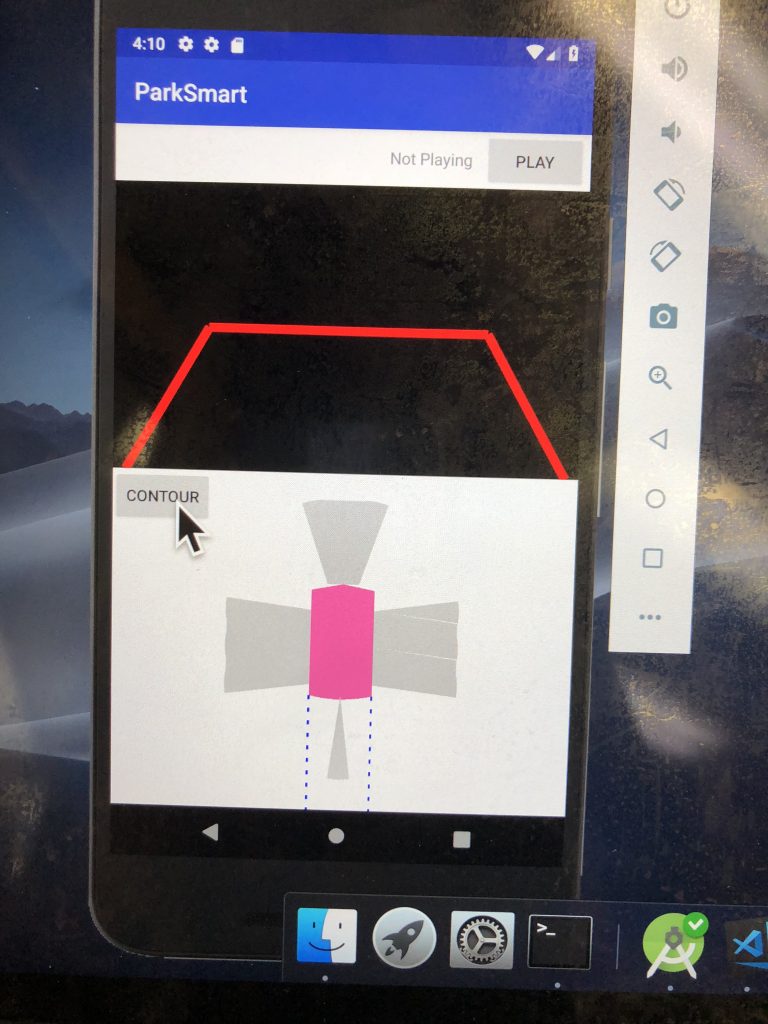
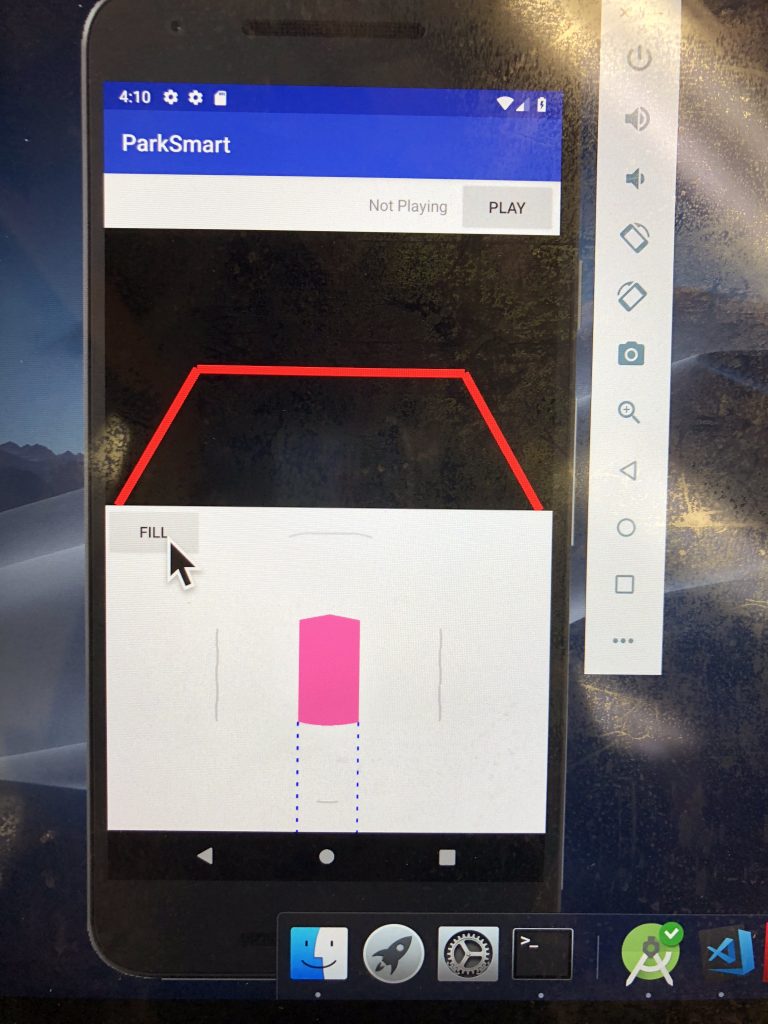
- Progress was made toward path prediction shown on the outline graph and path prediction overlay on the streamed video. Testing still needs to done next week to fine tune those.
- Prepare for midpoint demo: update our schedule & distribute work for the next 5 weeks
Hubert
- Rearranged socket code so that RPI can execute stream-related code when the outline drawing isn’t requesting data
- Worked on Arduino code for ultrasonic sensor sampling algorithm
- Changed continuous write to pull based write
- Changed median method to sample fewer values for lower delay without noticeable decrease in accuracy
- Worked around serial race condition to decrease delay
Yuqing
- Debug socket connection & analyze the problem
- Worked on front end and aesthetics
- Buttons
- Shaded area
- Worked on path prediction overlay & finish path prediction graph on the outline
Zilei
- Debug socket connection & analyze the problem
- Debug Arduino readings after it was changed from continuous write to pull-based
- Prepare for demo & revised Gantt Chart