
What we did this week as a group:
- Successfully connected multiple ultrasonic sensors to Raspberry Pi and realized distance data transfer from multiple sensors


- Tested accuracy of distance data from ultrasonic sensors and valid distance range and angle range of sensors. What we have learnt:
- Accuracy of sensor data fluctuates a lot at the very beginning and then slowly stabilizes
- Sensor has a limited range of roughly 2 meters and around 15 degrees
- Sensors occasionally will have glitches where the distance reading is way off. Some algorithm like median out of 5 readings will need to be used
- Interference between sensors can drive both sensors to be extremely inaccurate. Therefore, sensors need to far enough from each other in order to have accurate data.
- Interference between sensors get extremely high if there are no obstacles within 1m the sensors.
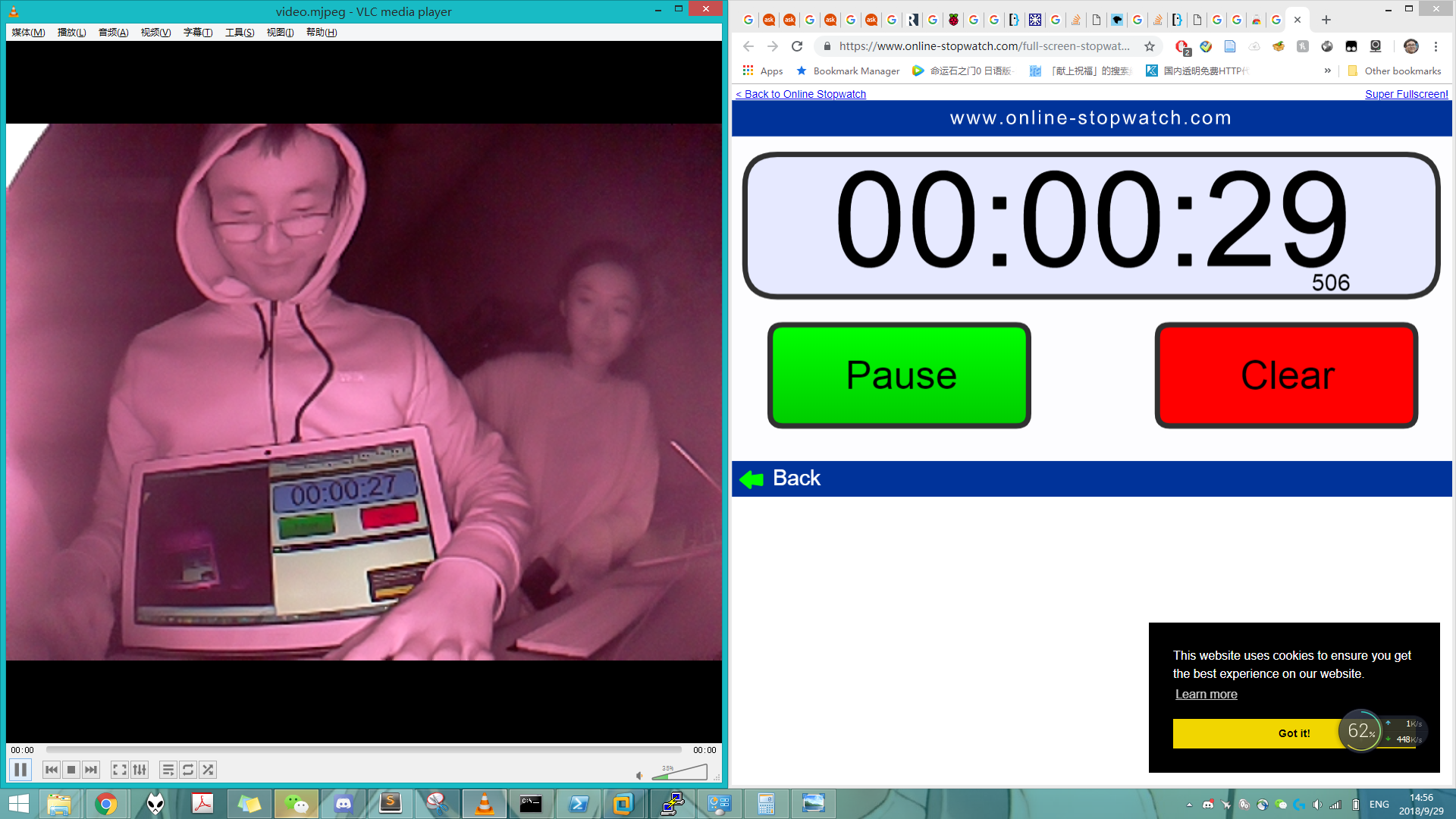
- Successfully connected camera to Raspberry Pi and enabled night-vision camera


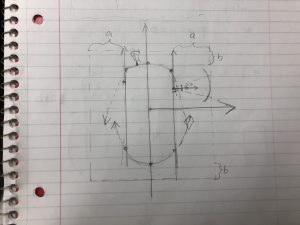
- Devised baseline algorithm for plotting of the surrounding environment based on distance data
- Testing of camera latency
- Day
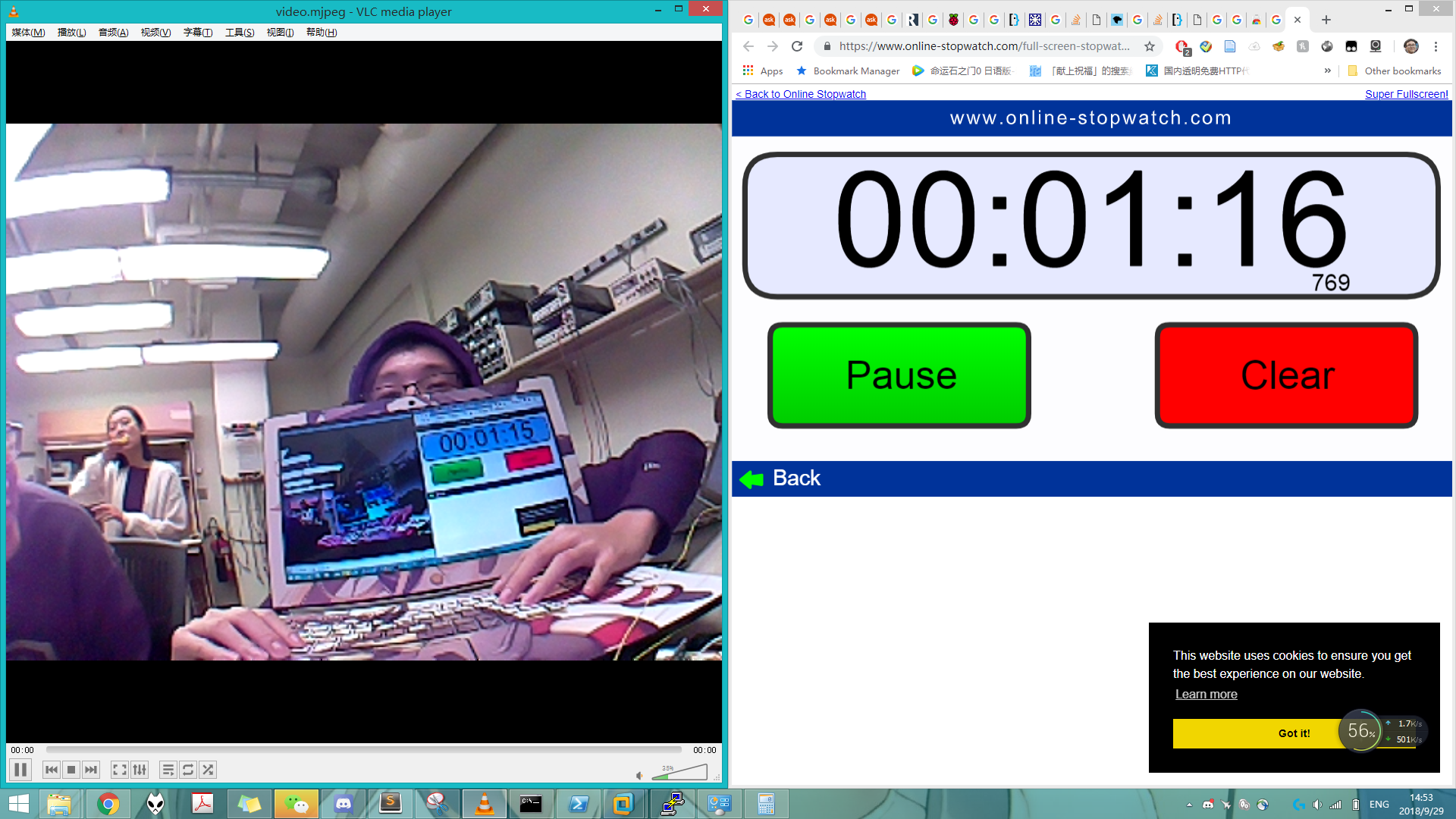
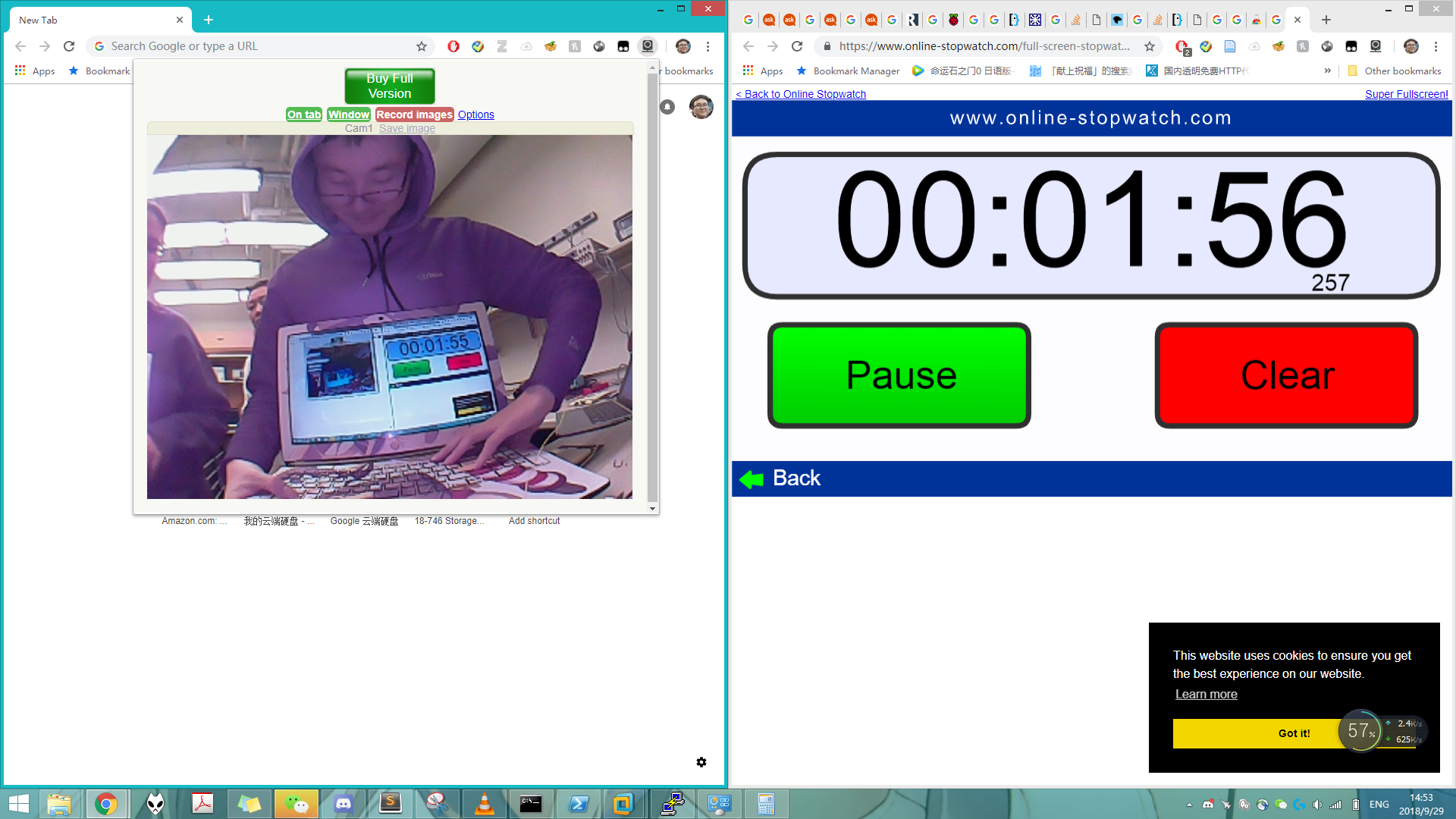
-
- Night
Hubert
- Realized connection between camera and Raspberry Pi
- Installed Raspberry pi camera module driver
- Installed uv4l camera video processing & streaming library
- Tested live-streaming of camera video and tried multiple streaming settings.
- H264 streaming result in long latency and due to the lack of compression & bandwidth limit, performance is bad (sutter & huge lag)
- MJPEG streaming does not depend on the key frame & thus bandwidth bottleneck does not stutter streaming as bad
- Achieved framerate about 10 fps, latency of daylight max 2s, night-vision max 3s
- H264 can be streamed in VLC player
- MJPEG can be streamed in browser & VLC player
Zilei
- Connected ultrasonic sensors to Raspberry Pi
- Tested the range and accuracy of ultrasonic sensors
- Drafted the baseline algorithm for outlining the surrounding environment based on sensor data
- Refined java functions drafted by Yuqing
Yuqing
- Connected ultrasonic sensors to Raspberry Pi
- Drafted python script that utilizes gpiozero module to parse data from ultrasonic sensors
- Drafted java functions that will be used to plot the position of the vehicle and the outline of obstacles around it
- Helped devise the baseline algorithm for plotting outline