What we did as a team
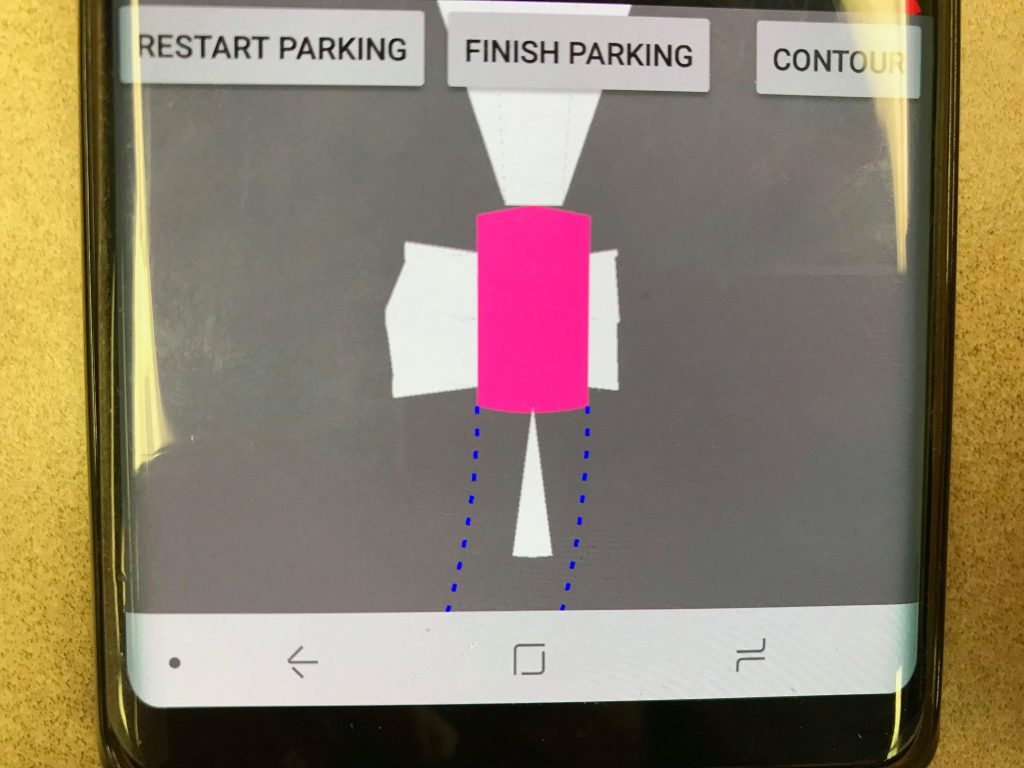
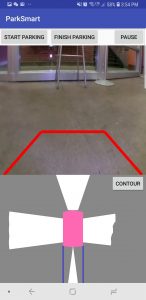
- Integrated parking algorithm and instruction generation into the Android App
- Conducted various tests
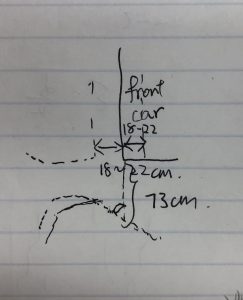
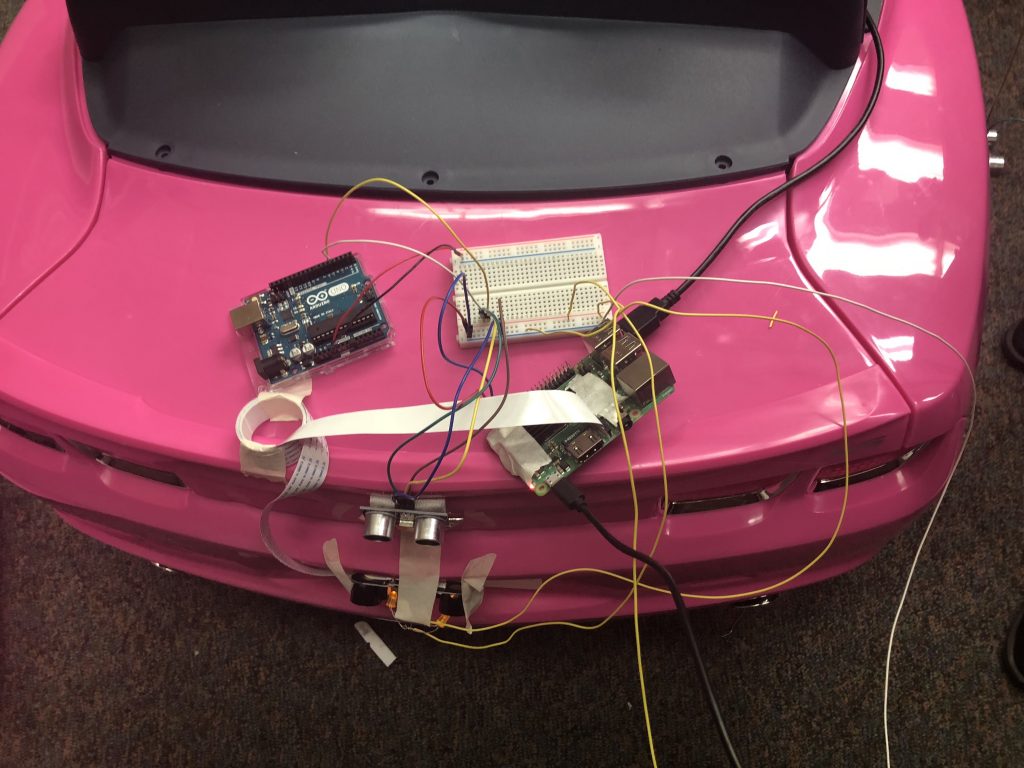
- distance test for ultrasonic sensors
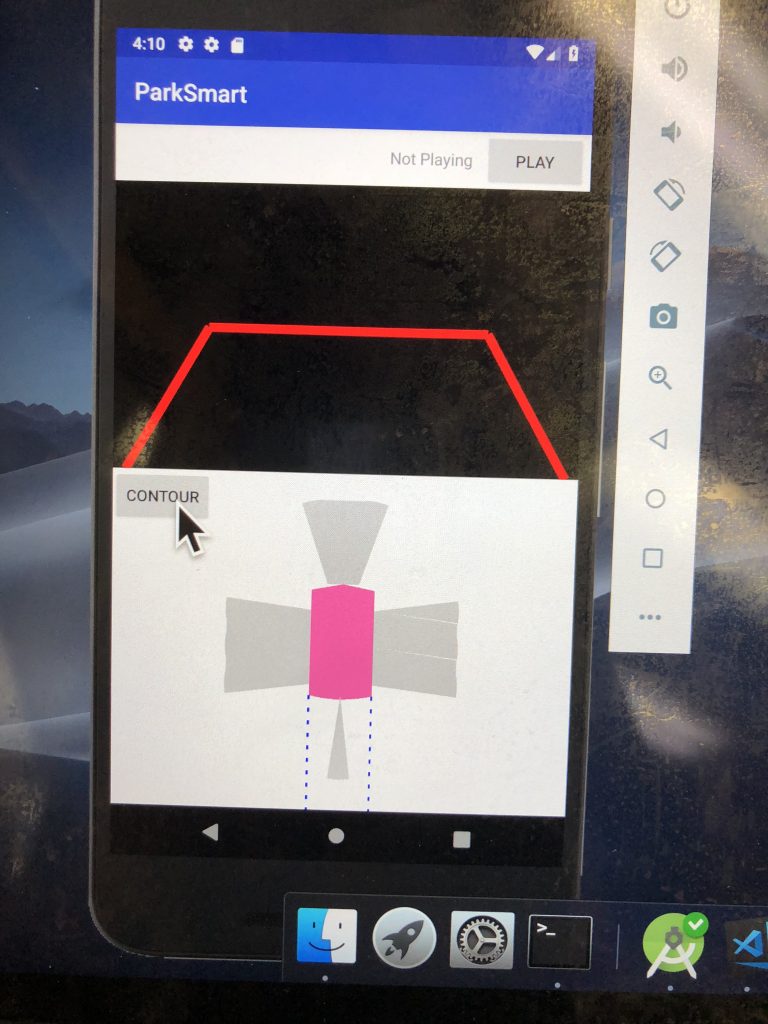
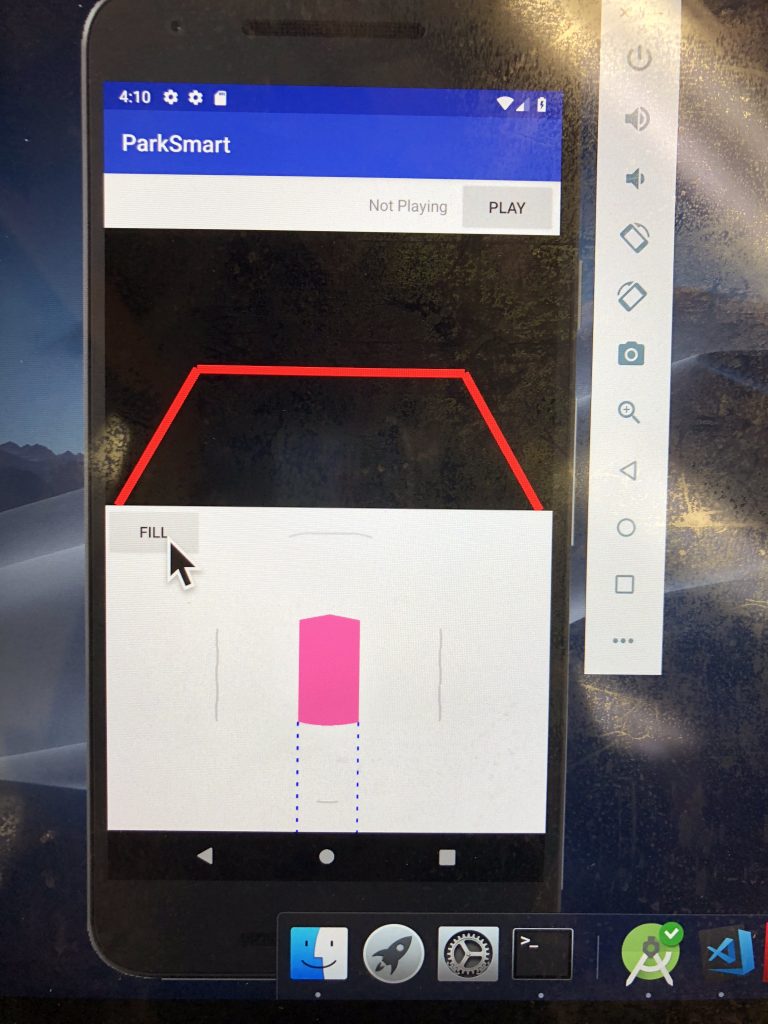
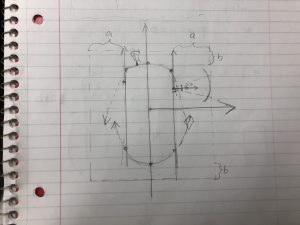
- predicted path
- parking algorithm user(Yuqing) testing
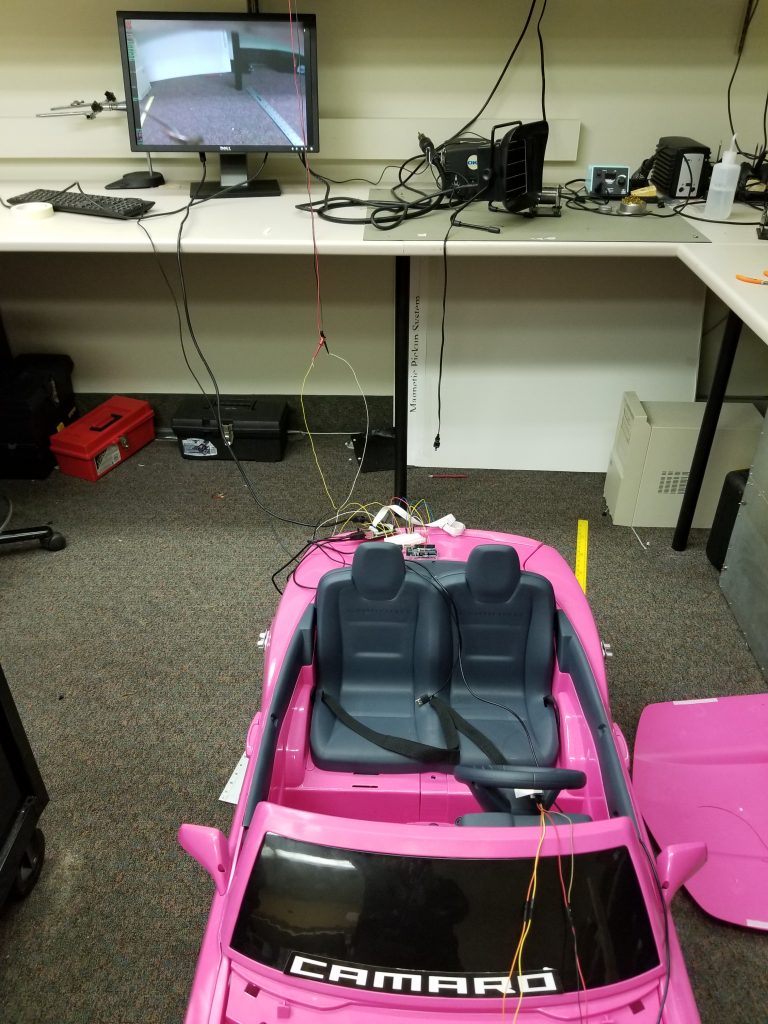
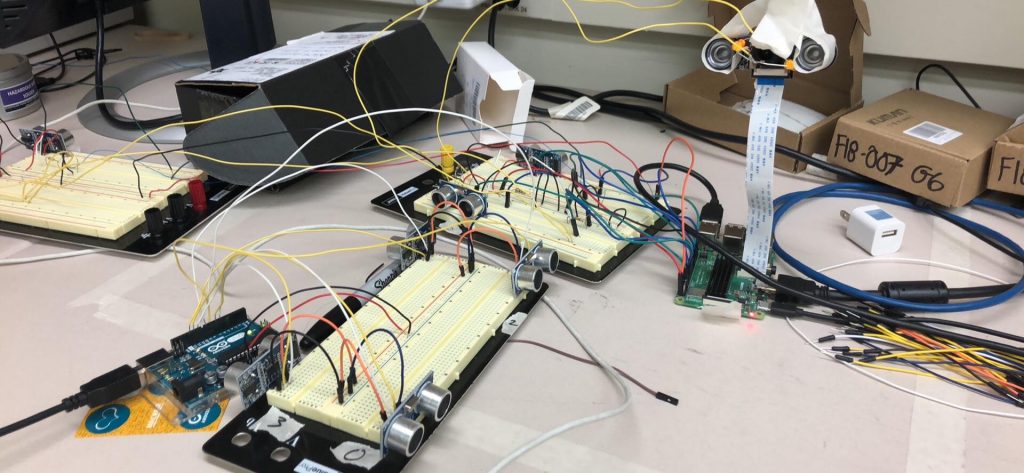
- Setup for testing sensor reading accuracy

Hubert
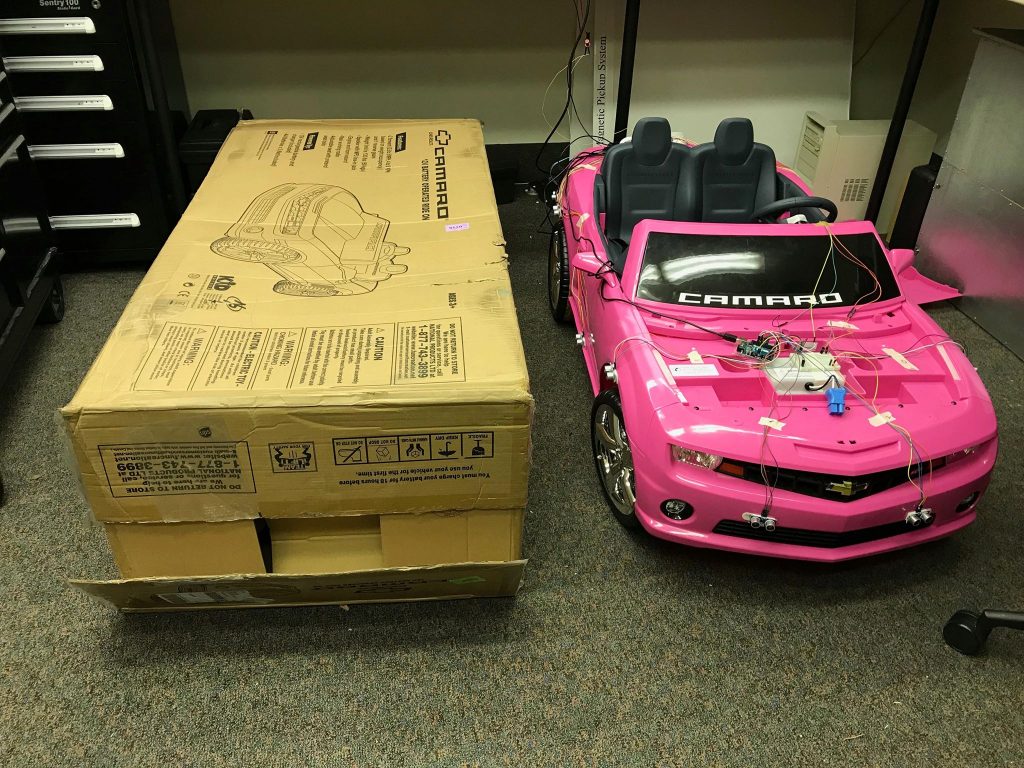
- Rewired the circuits to ensure better presentation of the vehicle
- Reconfigured arduino code to auto-restart after time-out
Zilei
- Finished working on parking algorithm
- adjusting finishing conditions
- adjusting verbosity of the instruction during the first phase
- adjusting range for appropriate distance to the right during the first phase
- adjusting detection mechanism for switching from state 2 to 3
- previously relying on a single point, due to unstable values at the reading point, changed to use 2 readings
Yuqing
- Finished working on audio instructions for parking algorithm
- Designated driver